
OpenArmX Leader
Overview
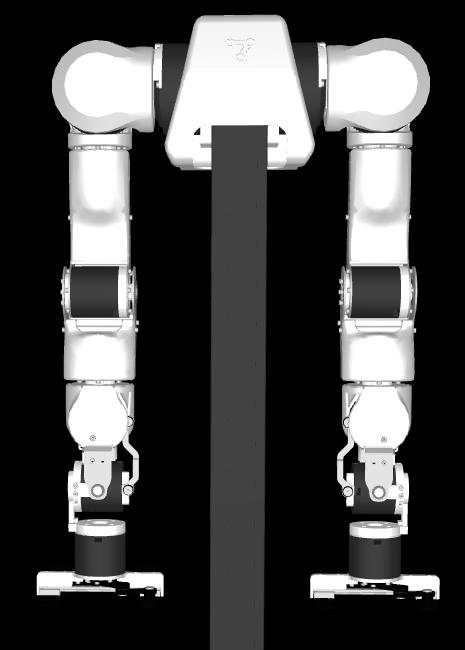
The OpenArmX Leader (also known as the remote arm/actuator) is a fully open-source, 14-degree-of-freedom (DOF) humanoid robotic arm designed for physical AI research and deployment in contact-rich environments. Its human-scale design, featuring high backdrive and a highly compliant structure, prioritizes safe human-robot interaction and is suitable for real-world tasks.
Features
• Human-Proportional Design: Designed for an approximately 633mm arm span, it provides optimal operational balance.
• Safe Architecture: Utilizes a QDD back-drive motor and a highly compliant design to ensure safe human-machine interaction.
• Durability: Key structural components are constructed of aluminum alloy and stainless steel, ensuring reliability for repeated data collection and ongoing research.
• Fully Open Source: Provides complete CAD, firmware, control code, and simulation tools for researchers and developers.
Parameter
Single-arm degree of freedom
8 DOF
Arm degrees of freedom
16 DOF
Single arm reach
670 mm
Maximum load
10.0 kg (peak) / 5.0 kg (rated)
Control method
CAN 2.0,1kHz
Structural materials
Aluminum alloy, stainless steel, 3D printing
Motor type
QDD back drive motor
Open Source Agreement
Apache 2.0
Communication Protocol
ROS2
price
RMB 59800

OpenArmX Followe
Overview
The OpenArmX Follower (also known as the controlled/executor) is a fully open-source, 14-degree-of-freedom (DOF) humanoid robotic arm designed for physical AI research and deployment in contact-rich environments. Its human-scale design, featuring high backdrive and a highly compliant structure, prioritizes safe human-robot interaction and is suitable for real-world tasks.
Features
• Human-Proportional Design: Designed for an approximately 633mm arm span, it provides optimal operational balance.
• Safe Architecture: Utilizes a QDD back-drive motor and a highly compliant design to ensure safe human-machine interaction.
• Durability: Key structural components are constructed of aluminum alloy and stainless steel, ensuring reliability for repeated data collection and ongoing research.
• Fully Open Source: Provides complete CAD, firmware, control code, and simulation tools for researchers and developers.
Parameter
Single-arm degree of freedom
8 DOF
Arm degrees of freedom
16 DOF
Single arm reach
670 mm
Maximum load
10.0 kg (peak) / 5.0 kg (rated)
Control method
CAN 2.0,1kHz
Structural materials
Aluminum alloy, stainless steel, 3D printing
Motor type
QDD back drive motor
Open Source Agreement
Apache 2.0
Communication Protocol
ROS2
price
RMB 59800


Get OpenArmX now.
Chengdu Changshu Robotics Co., Ltd. is an intelligent industrial robot solution technology company co-founded by senior technical talents from Stanford, Tsinghua University, ByteDance, Baidu and other companies. It focuses on using advanced AI technology to provide efficient and precise robot solutions for industrial manufacturing.
Tel: 17746530375
Email: wngxunyue1@163.com
Address: Huacheng Machinery Factory, No. 11, Xinye 8th Street, West District, Tianjin Economic and Technological Development Zone
OpenArmX Leader
Overview
The OpenArmX Leader (also known as the remote arm/actuator) is a fully open-source, 14-degree-of-freedom (DOF) humanoid robotic arm designed for physical AI research and deployment in contact-rich environments. Its human-scale design, featuring high backdrive and a highly compliant structure, prioritizes safe human-robot interaction and is suitable for real-world tasks.
Features
• Human-Proportional Design: Designed for an approximately 633mm arm span, it provides optimal operational balance.
• Safe Architecture: Utilizes a QDD back-drive motor and a highly compliant design to ensure safe human-machine interaction.
• Durability: Key structural components are constructed of aluminum alloy and stainless steel, ensuring reliability for repeated data collection and ongoing research.
• Fully Open Source: Provides complete CAD, firmware, control code, and simulation tools for researchers and developers.
Parameter
Single-arm degree of freedom
8 DOF
Arm degrees of freedom
16 DOF
Single arm reach
670 mm
Maximum load
10.0 kg (peak) / 5.0 kg (rated)
Control method
CAN 2.0,1kHz
Structural materials
Aluminum alloy, stainless steel, 3D printing
Motor type
QDD back drive motor
Open Source Agreement
Apache 2.0
Communication Protocol
ROS2
price
RMB 59800
OpenArmX Followe
Overview
The OpenArmX Follower (also known as the controlled/executor) is a fully open-source, 14-degree-of-freedom (DOF) humanoid robotic arm designed for physical AI research and deployment in contact-rich environments. Its human-scale design, featuring high backdrive and a highly compliant structure, prioritizes safe human-robot interaction and is suitable for real-world tasks.
Features
• Human-Proportional Design: Designed for an approximately 633mm arm span, it provides optimal operational balance.
• Safe Architecture: Utilizes a QDD back-drive motor and a highly compliant design to ensure safe human-machine interaction.
• Durability: Key structural components are constructed of aluminum alloy and stainless steel, ensuring reliability for repeated data collection and ongoing research.
• Fully Open Source: Provides complete CAD, firmware, control code, and simulation tools for researchers and developers.
Parameter
Single-arm degree of freedom
8 DOF
Arm degrees of freedom
16 DOF
Single arm reach
670 mm
Maximum load
10.0 kg (peak) / 5.0 kg (rated)
Control method
CAN 2.0,1kHz
Structural materials
Aluminum alloy, stainless steel, 3D printing
Motor type
QDD back drive motor
Open Source Agreement
Apache 2.0
Communication Protocol
ROS2
price
RMB 59800
Get OpenArmX now.
Chengdu Changshu Robotics Co., Ltd. is an intelligent industrial robot solution technology company co-founded by senior technical talents from Stanford, Tsinghua University, ByteDance, Baidu and other companies. It focuses on using advanced AI technology to provide efficient and precise robot solutions for industrial manufacturing.
Tel: 17746530375
Email: wngxunyue1@163.com
Address: Huacheng Machinery Factory, No. 11, Xinye 8th Street, West District, Tianjin Economic and Technological Development Zone
OpenArmX Leader
Overview
The OpenArmX Leader (also known as the remote arm/actuator) is a fully open-source, 14-degree-of-freedom (DOF) humanoid robotic arm designed for physical AI research and deployment in contact-rich environments. Its human-scale design, featuring high backdrive and a highly compliant structure, prioritizes safe human-robot interaction and is suitable for real-world tasks.
Features
• Human-Proportional Design: Designed for an approximately 633mm arm span, it provides optimal operational balance.
• Safe Architecture: Utilizes a QDD back-drive motor and a highly compliant design to ensure safe human-machine interaction.
• Durability: Key structural components are constructed of aluminum alloy and stainless steel, ensuring reliability for repeated data collection and ongoing research.
• Fully Open Source: Provides complete CAD, firmware, control code, and simulation tools for researchers and developers.
Parameter
Single-arm degree of freedom
8 DOF
Arm degrees of freedom
16 DOF
Single arm reach
670 mm
Maximum load
10.0 kg (peak) / 5.0 kg (rated)
Control method
CAN 2.0,1kHz
Structural materials
Aluminum alloy, stainless steel, 3D printing
Motor type
QDD back drive motor
Open Source Agreement
Apache 2.0
Communication Protocol
ROS2
price
RMB 59800
OpenArmX Follower
Overview
The OpenArmX Follower (also known as the controlled/executor) is a fully open-source, 14-degree-of-freedom (DOF) humanoid robotic arm designed for physical AI research and deployment in contact-rich environments. Its human-scale design, featuring high backdrive and a highly compliant structure, prioritizes safe human-robot interaction and is suitable for real-world tasks.
Features
• Human-Proportional Design: Designed for an approximately 633mm arm span, it provides optimal operational balance.
• Safe Architecture: Utilizes a QDD back-drive motor and a highly compliant design to ensure safe human-machine interaction.
• Durability: Key structural components are constructed of aluminum alloy and stainless steel, ensuring reliability for repeated data collection and ongoing research.
• Fully Open Source: Provides complete CAD, firmware, control code, and simulation tools for researchers and developers.
Parameter
Single-arm degree of freedom
8 DOF
Arm degrees of freedom
16 DOF
Single arm reach
670 mm
Maximum load
10.0 kg (peak) / 5.0 kg (rated)
Control method
CAN 2.0,1kHz
Structural materials
Aluminum alloy, stainless steel, 3D printing
Motor type
QDD back drive motor
Open Source Agreement
Apache 2.0
Communication Protocol
ROS2
price
RMB 59800
Get OpenArmX now.
Chengdu Changshu Robotics Co., Ltd. is an intelligent industrial robot solution technology company co-founded by senior technical talents from Stanford, Tsinghua University, ByteDance, Baidu and other companies. It focuses on using advanced AI technology to provide efficient and precise robot solutions for industrial manufacturing.
Tel: 17746530375
Email: wngxunyue1@163.com
Address: Huacheng Machinery Factory, No. 11, Xinye 8th Street, West District, Tianjin Economic and Technological Development Zone